Einsteiger haben es mitunter schwer einen einfachen Überblick über den Aufbau und die Verkabelung von Racecoptern / Multicoptern zu finden. Im folgenden Bild zeige ich daher die prinzipielle Verkabelung meines Racecopters. Beachten sollte man hierbei, dass es nur eine von vielen Konfigurationsmöglichkeiten darstellt. Das fängt beim Akku an und hört bei der Verbindung von Flight Controller und Empfänger auf.
Die unten gezeigte Illustration bezieht sich auf diesen Bausatz:
Weitere Informationen zum Bausatz, bzw. zu allen zusätzlichen Teilen findet ihr hier Günstigen Racecopter / Quadrocopter selber bauen und hier Teileliste für meinen Racecopter / Quadrocopter.
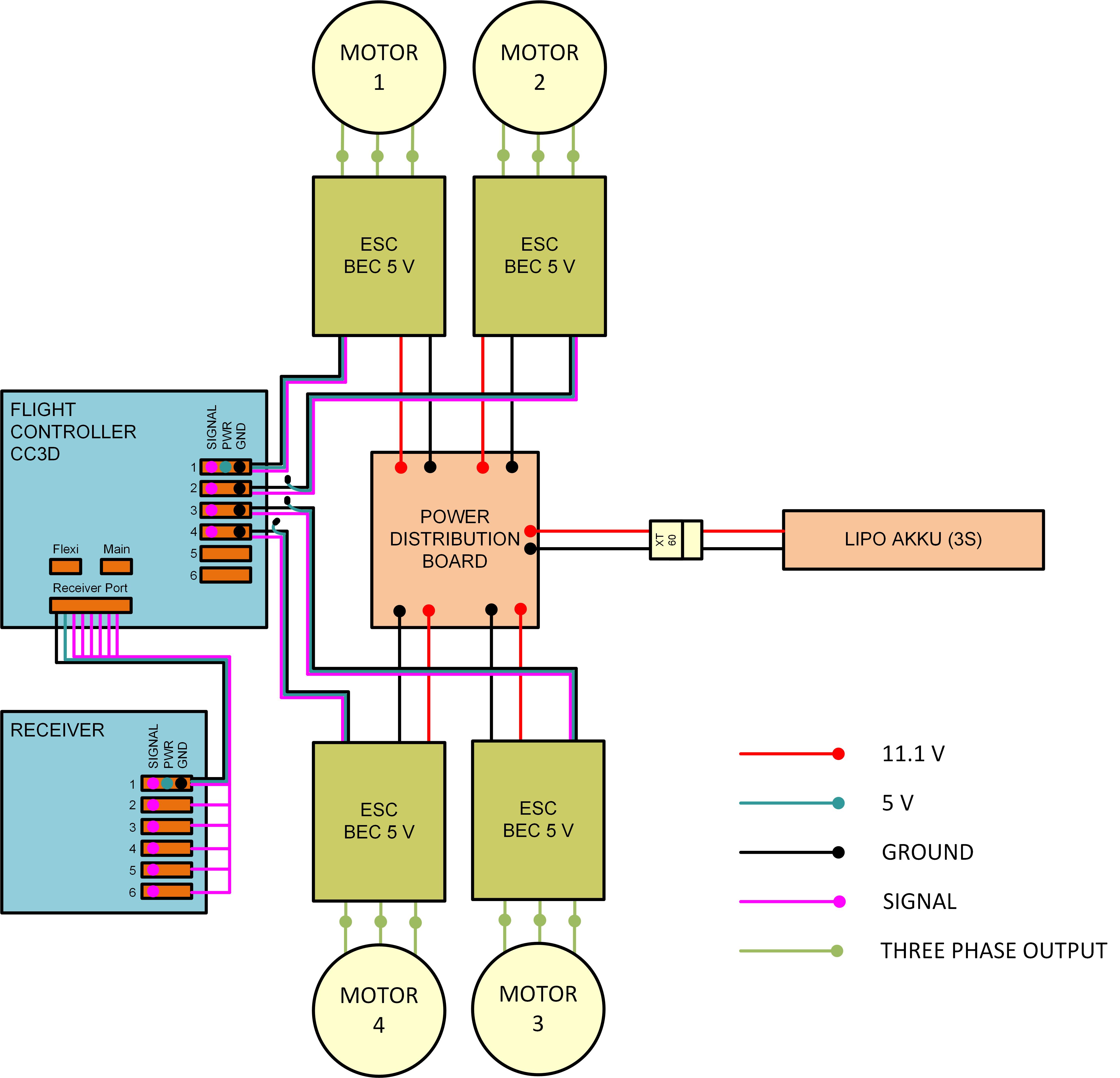
Akku
Der Racecopter wird von einem 3S Akku mit Strom versorgt, in meinem Fall verbunden durch einen XT60 Stecker. Der Akku liefert eine gesamte Nennspannung von 11.1 V (3 Zellen mit jeweils 3.7 V).
Power Distribution Board (PDB)
In diesem speziellen Fall erfüllt das PDB ausschließlich den Zweck den Strom vom Akku (11.1 V) an vier ESCs (Motorregler) mit integriertem 5 V BEC (Spannungsregler) zu verteilen. Genauso gut kann ein PDB mit integriertem Spannungsregler verbaut werden, welcher die 11.1 V direkt in 5 V umwandelt. Viele PDBs haben auch zusätzlich Anschlussstellen für LEDs oder für die Versorgung von Videosendern (FPV Sendern).
ESCs mit integriertem 5V BEC
Die ESCs versorgen die Motoren mit Spannung und regeln deren Leistung. Die integrierten BECs liefern jeweils 5 V. Für die Versorgung des Flight Controllers (in meinem Fall ein CC3D) wird nur eines der 5 V BECs verwendet. Bei den drei übrig gebliebenen BECs wird jeweils die Stromversorgung (PWR) abgeklemmt.
Flight Controller (CC3D) und Empfänger
Der Empfänger wird vom Flight Controller mit 5V Spannung versorgt. Außerdem bekommt er Signale vom Sender (Fernbedienung) und gibt sie an den Flight Controller weiter. Der Flight Controller wiederum interpretiert die Signale des Empfängers und steuert damit die ESCs (Motorregler) an. In meinem Fall sind Flight Controller und Receiver über den Receiver Port des CC3D verbunden. Für eine genaue Auflistung der Anschlussmöglichkeiten beim CC3D empfehle ich das (endlich wieder verfügbare) OpenPilot Wiki.
Das Ganze hat keinen Anspruch auf Vollständigkeit und soll nur den prinzipiellen Aufbau verdeutlichen. Es stellt nur eine Möglichkeit von vielen dar. Fügt man zur oben gezeigten grundlegenden Verkabelung eine FPV Ausrüstung (First Person View) hinzu, sieht das Ganze wie folgt aus:
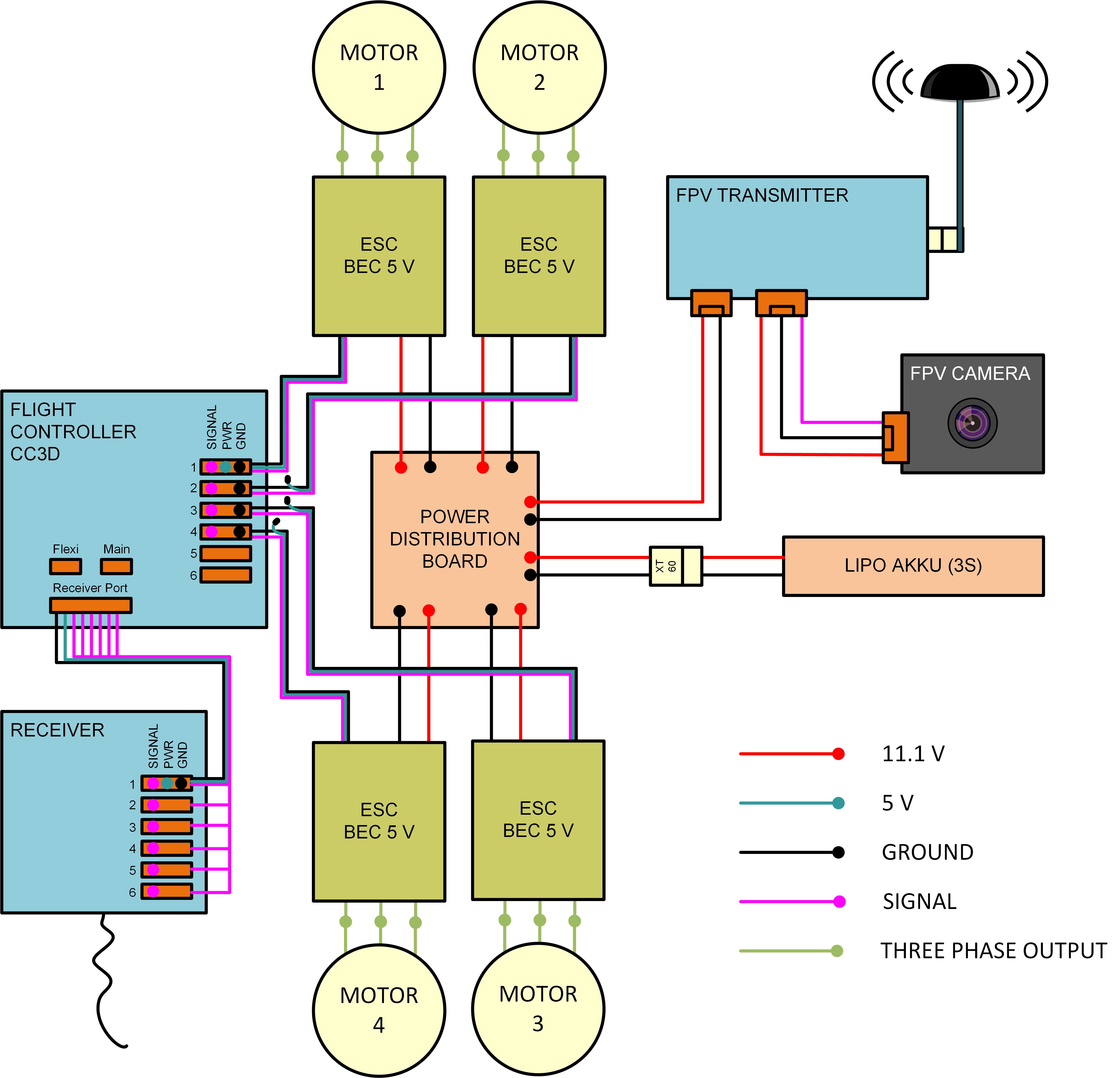
Beim oben gezeigten Beispiel wird der FPV Sender direkt mit 11.1 V versorgt. In meinem Fall ist das ein ImmersionRC 5.8 GHz Audio/Video Raceband Transmitter (25mW) und eine Fatshark 700TVL V2 Kamera.






One thought to “Multicopter / Racecopter Verkabelung”